本文只对opencv函数算子做中文说明,不以实例展示函数算子的用法与运行效果,如有兴趣,可自行编写代码查看效果。

OpenCV
Sobel
使用扩展 Sobel 算子计算一阶、二阶、三阶或混合图像差分
复制
void cvSobel( const CvArr* src, CvArr* dst, int xorder, int yorder, int aperture_size=3 );
- src
- 输入图像.
- dst
- 输出图像.
- xorder
- x 方向上的差分阶数
- yorder
- y 方向上的差分阶数
- aperture_size
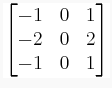
- 扩展 Sobel 核的大小,必须是 1, 3, 5 或 7。 除了尺寸为 1, 其它情况下, aperture_size ×aperture_size 可分离内核将用来计算差分。对 aperture_size=1的情况, 使用 3×1 或 1×3 内核 (不进行高斯平滑操作)。这里有一个特殊变量 CV_SCHARR (=-1),对应 3×3 Scharr 滤波器,可以给出比 3×3 Sobel 滤波更精确的结果。Scharr 滤波器系数是:
-
OpenCV函数Sobel算子详解
-
- 对 x-方向 以及转置矩阵对 y-方向。
函数 cvSobel 通过对图像用相应的内核进行卷积操作来计算图像差分:

OpenCV函数Sobel算子详解
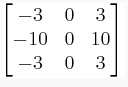
由于Sobel 算子结合了 Gaussian 平滑和微分,所以,其结果或多或少对噪声有一定的鲁棒性。通常情况,函数调用采用如下参数 (xorder=1, yorder=0, aperture_size=3) 或 (xorder=0, yorder=1, aperture_size=3) 来计算一阶 x- 或 y- 方向的图像差分。第一种情况对应:
OpenCV函数Sobel算子详解
第二种对应:
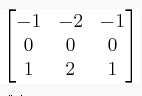
OpenCV函数Sobel算子详解
或者
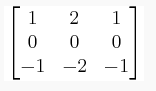
OpenCV函数Sobel算子详解
核的选则依赖于图像原点的定义 (origin 来自 IplImage 结构的定义)。由于该函数不进行图像尺度变换,所以和输入图像(数组)相比,输出图像(数组)的元素通常具有更大的绝对数值(译者注:即象素的深度)。为防止溢出,当输入图像是 8 位的,要求输出图像是 16 位的。当然可以用函数 cvConvertScale 或 cvConvertScaleAbs 转换为 8 位的。除了 8-比特 图像,函数也接受 32-位 浮点数图像。所有输入和输出图像都必须是单通道的,并且具有相同的图像尺寸或者ROI尺寸。


评论 (0)