松下伺服驱动器出现碰到限位传感器后,轴不能立即停止,表现为碰到限位传感器后,仍然运动,或减速运动,或报警掉使能等。解决办法是将对象编辑器中6084H与6085H两个值放大。
6084h:目标减速度
6085h:立即停止减速度
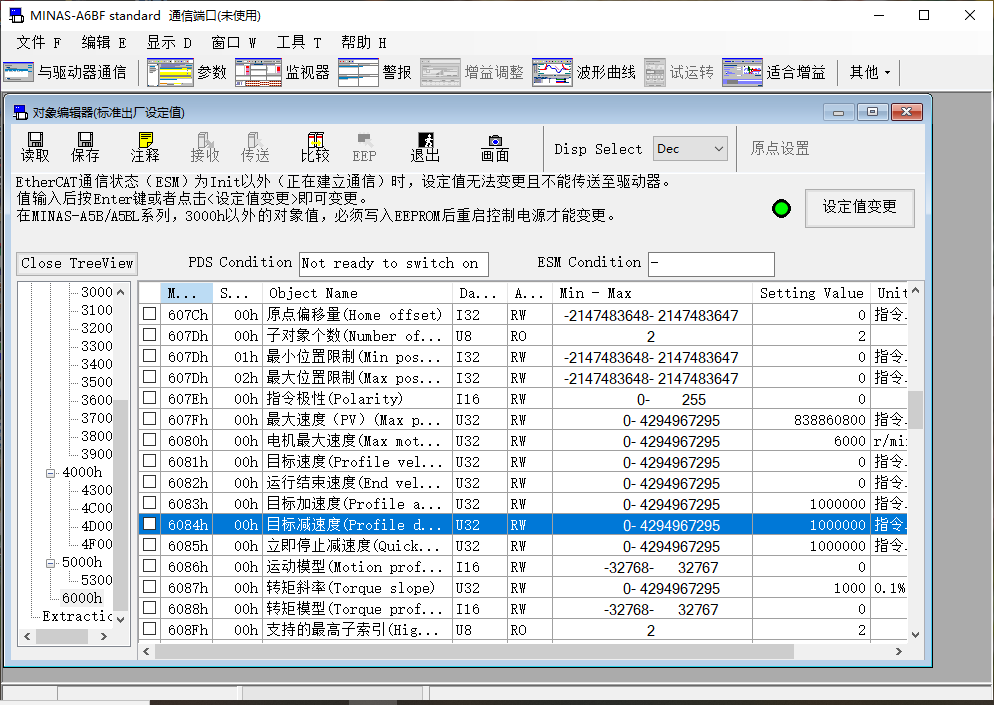
默认值是100万,将其放大到5个亿或者更大即可。
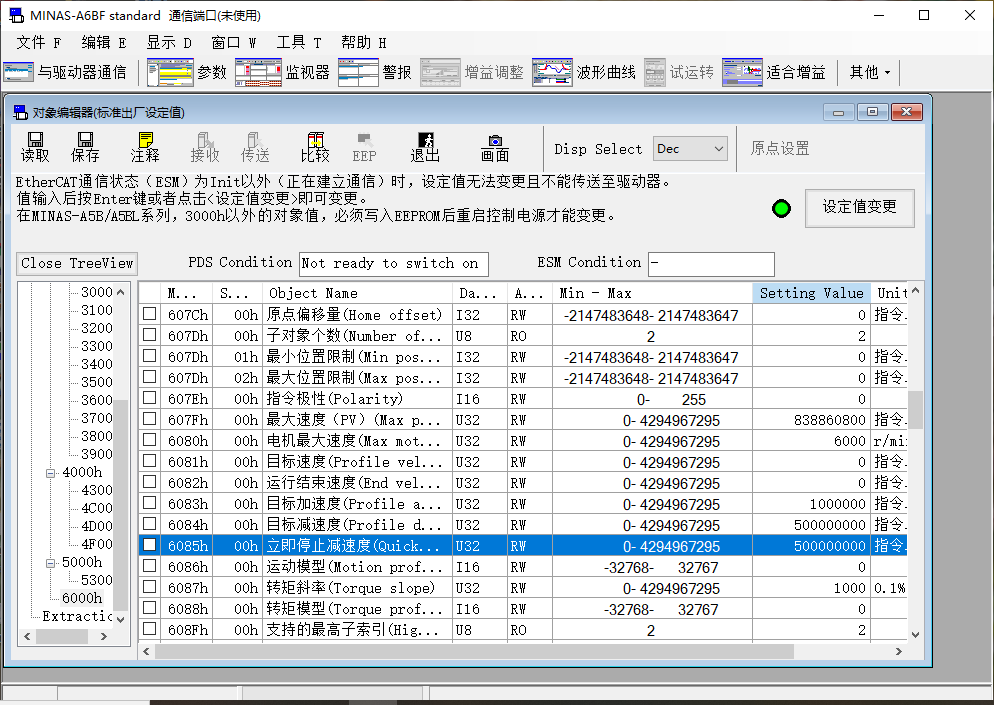
编辑好后记得点击设定值变更。
此设定有效前提是伺服驱动器Pr5.04驱动禁止输入设定选项,设定值必须为有效或CoE(CIA402)侧减速停止。
松下伺服驱动器出现碰到限位传感器后,轴不能立即停止,表现为碰到限位传感器后,仍然运动,或减速运动,或报警掉使能等。解决办法是将对象编辑器中6084H与6085H两个值放大。
6084h:目标减速度
6085h:立即停止减速度
默认值是100万,将其放大到5个亿或者更大即可。
编辑好后记得点击设定值变更。
此设定有效前提是伺服驱动器Pr5.04驱动禁止输入设定选项,设定值必须为有效或CoE(CIA402)侧减速停止。


评论 (0)