松下伺服驱动器A6BF系列是EtherCAT总线类型驱动器,X4连接器没有固定意义,想要修改信号极性需要通过参数来改变,参数如下表所示。
| 信号名称 | 記号 | 设定值 | |
| 常开 | 常闭 | ||
| 无效 | – | 00h | 设定不可 |
| 正方向驱动禁止输入 | POT | 01h | 81h |
| 负方向驱动禁止输入 | NOT | 02h | 82h |
| 外部报警清除输入 | A-CLR | 04h | 设定不可 |
| 强制报警输入 | E-STOP | 14h | 94h |
| 动态制动器切换输入 | DB-SEL | 16h | 设定不可 |
| 外部锁存输入 1 | EXT1 | 20h | A0h |
| 外部锁存输入 2 | EXT2 | 21h | A1h |
| 原点近傍输入 | HOME | 22h | A2h |
| 回退动作输入 | RET | 27h | A7h |
| 通用监视器输入 1 | SI-MON1 | 2Eh | AEh |
| 通用监视器输入 2 | SI-MON2 | 2Fh | AFh |
| 通用监视器输入 3 | SI-MON3 | 30h | B0h |
| 通用监视器输入 4 | SI-MON4 | 31h | B1h |
| 通用监视器输入 5 | SI-MON5 | 32h | B2h |
打开松下伺服驱动器调试软件PANATERM,可以去松下官网下载。进入参数设置页面,选择I/F连接器设置。
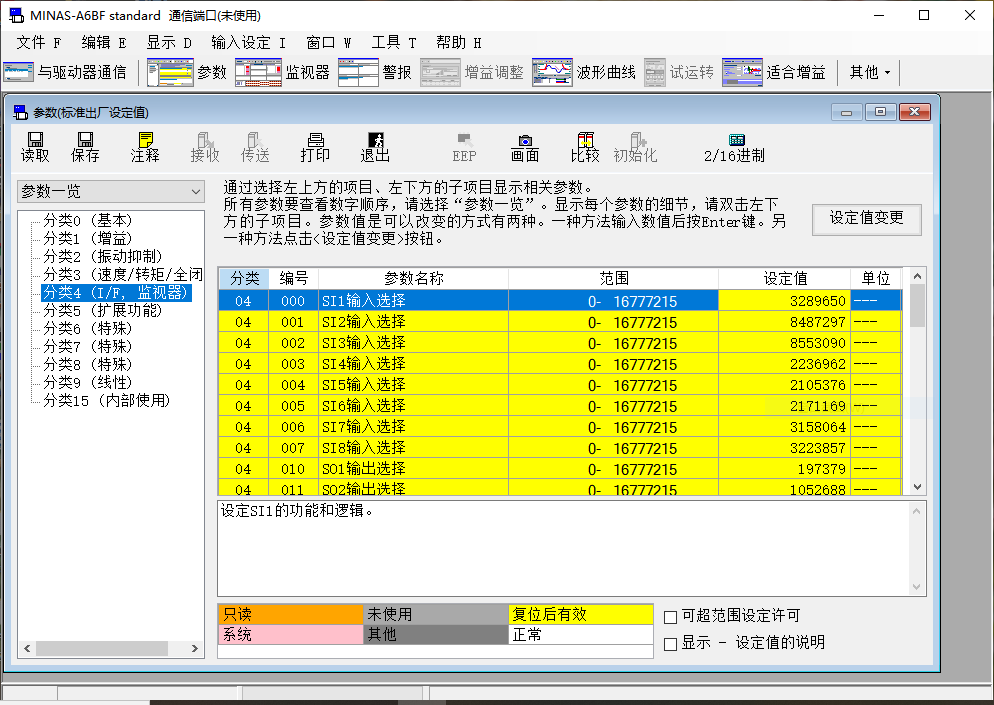
SI指信号输入,SO指信号输出。对应的X4连接器针脚见这篇文章。松下伺服驱动器A6BF系列X4连接器说明
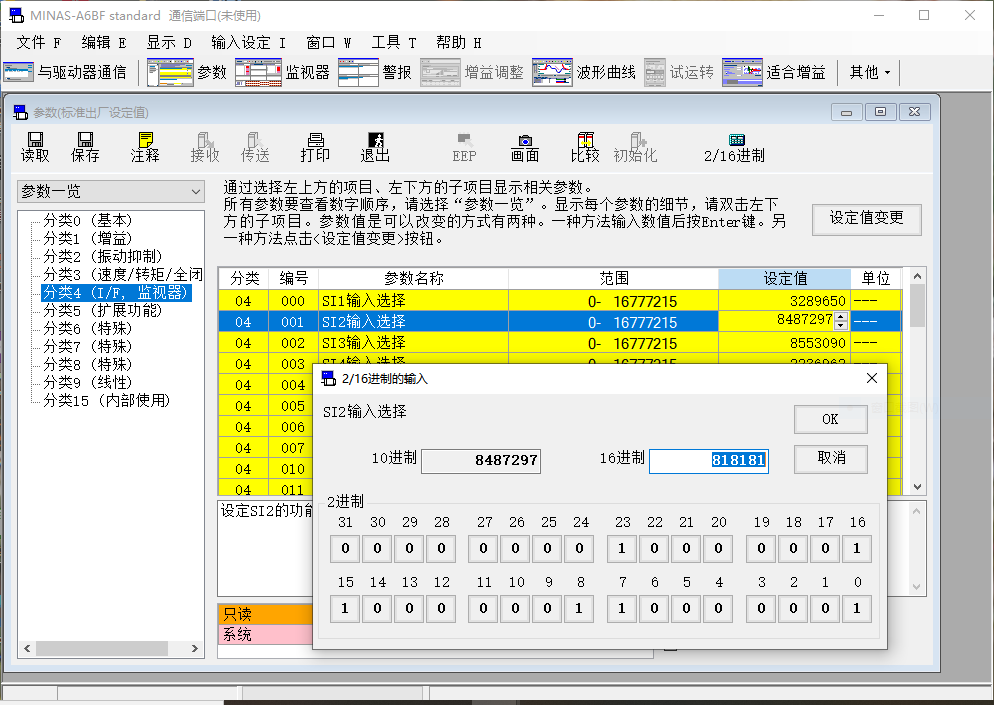
以SI2正限位信号为例,默认的出厂值是8487297转换为16进制是818181,对应上表的常闭功能码,如果不修改它不接传感器的情况下,试运转都动不了。
点击工具栏的2/16进制按钮,进入快速编辑页面。查阅上表可知,常开的功能码是01,所以在16进制编辑框中输入010101点击OK即可设置。
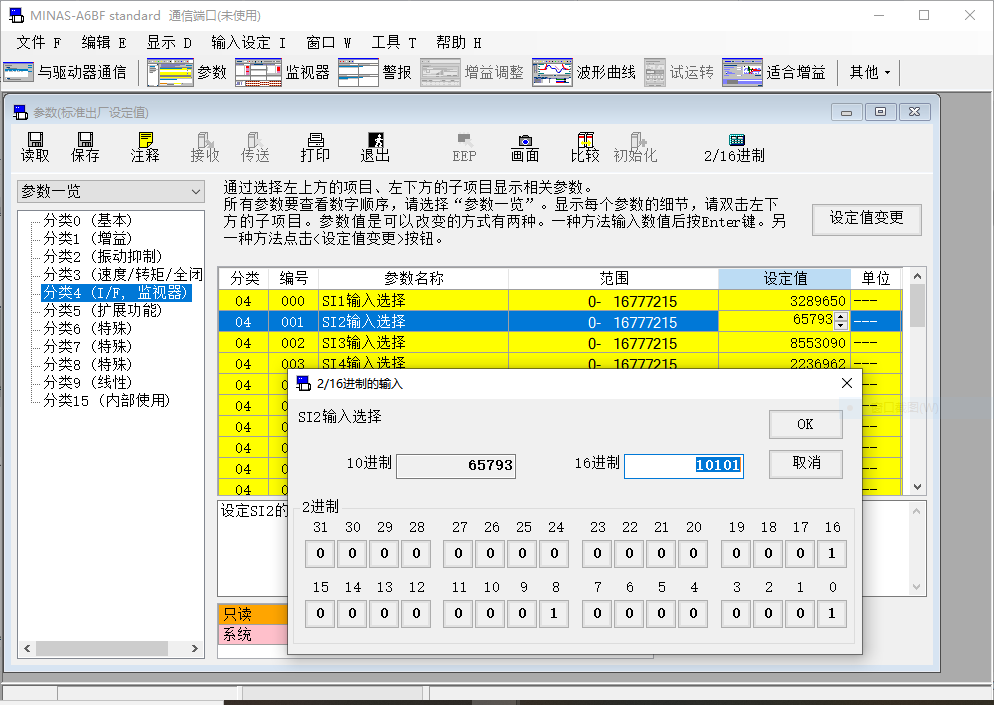
注意:黄色背景的参数设置后需要点击工具栏的EEP写入到内存,并且需要断电重启才能生效!


评论 (10)