OpenCV实现机器人对物体进行移动跟随案例。此文是视觉行业者发布的教程,转载自CSDN。写得很详细,值得学习,虽然我还没学到这里,但不妨碍我收藏分享。本案例实现对特殊颜色物体的识别,并实现根据物体位置的改变进行控制跟随。
物体识别代码
复制
import cv2 as cv
# 定义结构元素
kernel = cv.getStructuringElement(cv.MORPH_RECT, (3, 3))
# print kernel
capture = cv.VideoCapture(0)
print capture.isOpened()
ok, frame = capture.read()
lower_b = (65, 43, 46)
upper_b = (110, 255, 255)
height, width = frame.shape[0:2]
screen_center = width / 2
offset = 50
while ok:
# 将图像转成HSV颜色空间
hsv_frame = cv.cvtColor(frame, cv.COLOR_BGR2HSV)
# 基于颜色的物体提取
mask = cv.inRange(hsv_frame, lower_b, upper_b)
mask2 = cv.morphologyEx(mask, cv.MORPH_OPEN, kernel)
mask3 = cv.morphologyEx(mask2, cv.MORPH_CLOSE, kernel)
# 找出面积最大的区域
_, contours, _ = cv.findContours(mask3, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
maxArea = 0
maxIndex = 0
for i, c in enumerate(contours):
area = cv.contourArea(c)
if area > maxArea:
maxArea = area
maxIndex = i
# 绘制
cv.drawContours(frame, contours, maxIndex, (255, 255, 0), 2)
# 获取外切矩形
x, y, w, h = cv.boundingRect(contours[maxIndex])
cv.rectangle(frame, (x, y), (x+w, y+h), (255, 0, 0), 2)
# 获取中心像素点
center_x = int(x + w/2)
center_y = int(y + h/2)
cv.circle(frame, (center_x, center_y), 5, (0, 0, 255), -1)
# 简单的打印反馈数据,之后补充运动控制
if center_x < screen_center - offset:
print "turn left"
elif screen_center - offset <= center_x <= screen_center + offset:
print "keep"
elif center_x > screen_center + offset:
print "turn right"
cv.imshow("mask4", mask3)
cv.imshow("frame", frame)
cv.waitKey(1)
ok, frame = capture.read()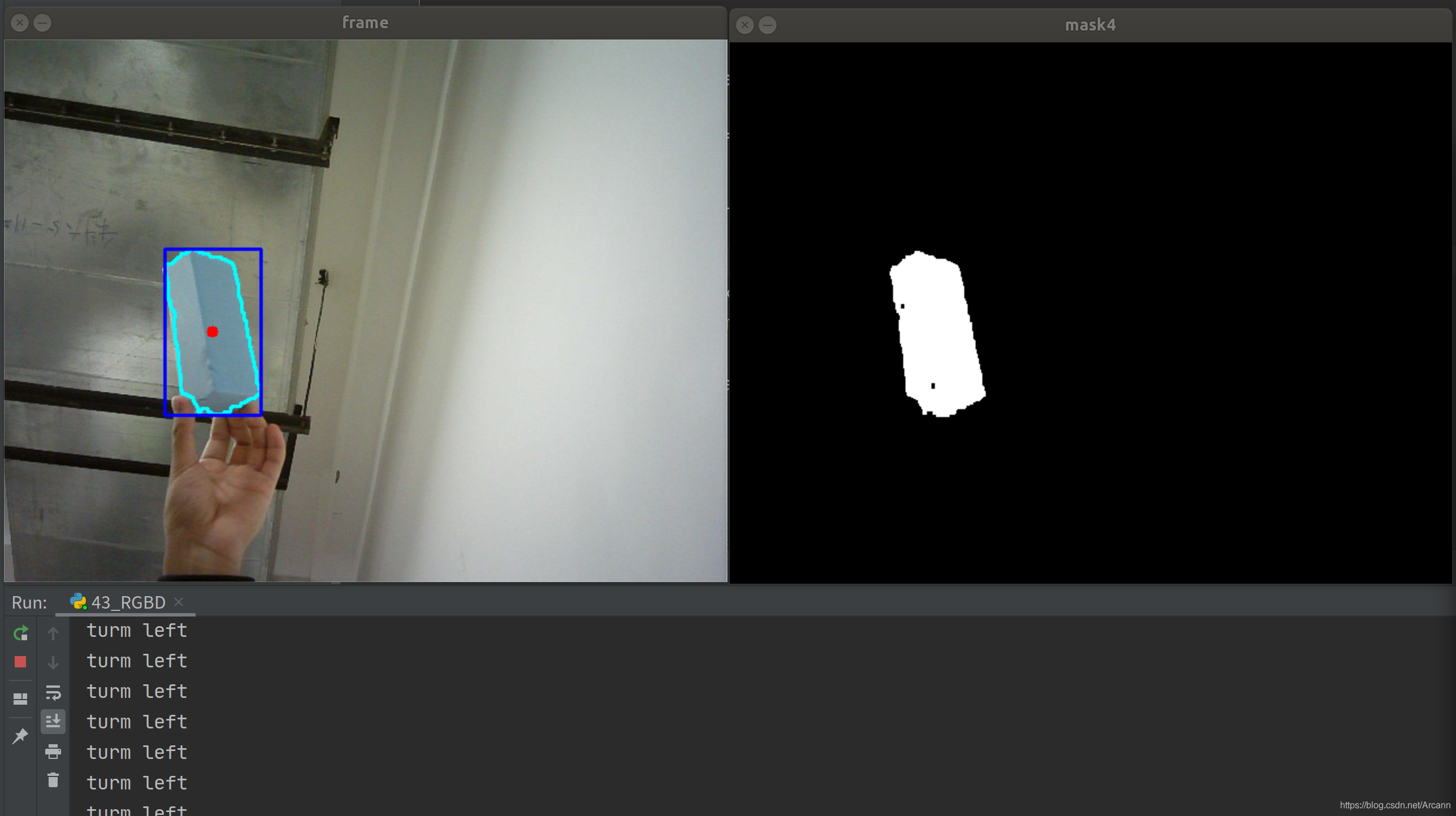
OpenCV实现机器人对物体进行移动跟随
移动跟随
结合ROS控制turtlebot3或其他机器人运动,首先启动turtlebot3,如下代码可以放在机器人的树莓派中,将相机插在USB口即可。
复制
import rospy
import cv2 as cv
from geometry_msgs.msg import Twist
def shutdown():
twist = Twist()
twist.linear.x = 0
twist.angular.z = 0
cmd_vel_Publisher.publish(twist)
print "stop"
if __name__ == '__main__':
rospy.init_node("follow_node")
rospy.on_shutdown(shutdown)
rate = rospy.Rate(100)
cmd_vel_Publisher = rospy.Publisher("/cmd_vel", Twist, queue_size=1)
# 定义结构元素
kernel = cv.getStructuringElement(cv.MORPH_RECT, (3, 3))
# print kernel
capture = cv.VideoCapture(0)
print capture.isOpened()
ok, frame = capture.read()
lower_b = (65, 43, 46)
upper_b = (110, 255, 255)
height, width = frame.shape[0:2]
screen_center = width / 2
offset = 50
while not rospy.is_shutdown():
# 将图像转成HSV颜色空间
hsv_frame = cv.cvtColor(frame, cv.COLOR_BGR2HSV)
# 基于颜色的物体提取
mask = cv.inRange(hsv_frame, lower_b, upper_b)
mask2 = cv.morphologyEx(mask, cv.MORPH_OPEN, kernel)
mask3 = cv.morphologyEx(mask2, cv.MORPH_CLOSE, kernel)
# 找出面积最大的区域
_, contours, _ = cv.findContours(mask3, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
maxArea = 0
maxIndex = 0
for i, c in enumerate(contours):
area = cv.contourArea(c)
if area > maxArea:
maxArea = area
maxIndex = i
# 绘制
cv.drawContours(frame, contours, maxIndex, (255, 255, 0), 2)
# 获取外切矩形
x, y, w, h = cv.boundingRect(contours[maxIndex])
cv.rectangle(frame, (x, y), (x + w, y + h), (255, 0, 0), 2)
# 获取中心像素点
center_x = int(x + w / 2)
center_y = int(y + h / 2)
cv.circle(frame, (center_x, center_y), 5, (0, 0, 255), -1)
# 简单的打印反馈数据,之后补充运动控制
twist = Twist()
if center_x < screen_center - offset:
twist.linear.x = 0.1
twist.angular.z = 0.5
print "turn left"
elif screen_center - offset <= center_x <= screen_center + offset:
twist.linear.x = 0.3
twist.angular.z = 0
print "keep"
elif center_x > screen_center + offset:
twist.linear.x = 0.1
twist.angular.z = -0.5
print "turn right"
else:
twist.linear.x = 0
twist.angular.z = 0
print "stop"
# 将速度发出
cmd_vel_Publisher.publish(twist)
# cv.imshow("mask4", mask3)
# cv.imshow("frame", frame)
cv.waitKey(1)
rate.sleep()
ok, frame = capture.read()虽然opencv用得少,但是其原理可以借鉴,换成halcon与visionpro理论上都是可以实现的,有兴趣的可以试试。


评论 (0)